Hi @jackobocze ,
pipe components already have a color change animation and this animation cannot be reassigned by creating the parent group. At first, you have to make ordinary images out of the components. Click on the pipe one by one and ungroup them (Ctrl+Shift+G). Then group the pipe images (Ctrl+G) and assign them an animation (Ctrl+J).
Cheers,
Jan
R
Posts
-
RE: HMI group color changeposted in REXYGEN HMI Designer
-
RE: Error message when downloadingposted in General
@mikeyh
Hi Mike,
do you have the same versions of REXYGEN on your Raspberry Pi and PC? Can the RPi be pinged from your computer?Cheers,
Jan -
RE: HMI on PC (localhost)posted in REXYGEN HMI Designer
@jackobocze Hi,
when you use the RPi driver, you have to always upload the program to the RPi. In the HMI Designer on the PC, you can then connect to the running executive on the RPi and browse the aliases & connection strings as @cechurat mentioned. To develop the HMI in this case, you ideally already need to have both a PC and RPi available. Another option is to fill connection strings manually. -
RE: Relační blokyposted in REXYGEN Studio
@jackobocze Dobrý den,
pravděpodobně hledáte blok SAT. Dokumentace je zde: https://www.rexygen.com/doc/ENGLISH/MANUALS/BRef/SAT.html#x128-1270007 -
RE: How to connect RPi to PC over ethernet cableposted in REXYGEN Studio
@jackobocze Dobrý den,
ano je. Je potřeba na obou zařízeních nastavit statické adresy. Ve studiu pak zadáte adresu Raspberry.
S pozdravem,
Reitinger -
RE: DS18B20 wireless senzorposted in 1-Wire
@jackobocze Dobrý den, díky za zpětnou vazbu. Jsem rád, že vše funguje. Pro čtení dat z více senzorů stačí přidat do REXYGENu víc bloků, do kterých bude zapisovat další čidlo. Já si do sketche pro ESP ještě přidal deep sleep funkci kvůli úspoře energie a čídla napájím z akumulátoru.
-
RE: DS18B20 wireless senzorposted in 1-Wire
@jackobocze Omlouvám se, netestoval jsem, zda vše stále funguje a mezi tím se změnily parametry některých funkcí v knihovně ESP8266HTTPClient. Posílám upravený sketch, který jsem právě otestoval a funguje mi pro daný příklad. REXYGEN_REST_API_example.ino
-
RE: DS18B20 wireless senzorposted in 1-Wire
@jackobocze Dobrý den, nemáte zač. Hodnotu teploty můžete posílat z nodemcu přímo na zařízení, na kterém Vám běží REXYGEN a nemusíte využívat žádné webové uložiště. Určitě koukněte na příklad, který zmiňoval @cechurat . Je tam připravený sketch pro ESP8266 v Arduino IDE. Ve sketchi je potřeba změnit IP adresu na adresu Vašeho zařízení (Raspberry Pi) a případně přihlašovací údaje do REXYGENu. Po spuštění sketche a úspěšném připojení ESP k Wifi by se Vám měly změnit hodnoty v běžícím REXYGEN projektu na Raspberry. Samozřejmě je potřeba na RPi spustit přiložený REX projekt v příkladu, případně upravit sketch. Napoprvé bych ale vyzkoušel zprovoznit připravený příklad s co nejméně změnami.
S pozdravem,
Reitinger -
RE: DS18B20 wireless senzorposted in 1-Wire
@jackobocze Dobrý den,
pokud to správně chápu, chcete posílat data z esp8266 do RPi přes WiFi. Pokud je RPi přístupné ve Vaší místní síti, můžete údaje o teplotě zapisovat z esp8266 pomocí HTTP requestů a REST API (dokumentace zde). Případně můžete z esp8266 odesílat UDP packety a v REXYGENu je číst pomocí bloku REXLANG nebo PYTHON. Nejjednodušší mi přijde využití REST API. Python blok má tu výhodu, že můžete využít zdrojové kódy a knihovny dostupné na internetu. Pro REXLANG blok naleznete příklad UDP Receiveru v knihovně příkladů pod jménem 0502_Generic_I2C_Communication.S pozdravem,
Reitinger -
RE: PIDGS - switching logicposted in REXYGEN Studio
@fabio Dear Fabio,
you're absolutely right. We will fix the documentation and it will be correct in the next release. Thanks for the heads up.Cheers,
Jan -
RE: WebWatchposted in REXYGEN HMI Designer
@mikeyh Hi Mike,
this is REXYGEN's bug. WebWatch does not work properly in recent versions. It should be fixed in the next version. We apologize for the inconvenience.Cheers,
Jan -
RE: Fan Speed Control with Counterposted in Monarco HAT
@mikeyh
Hi Mike,
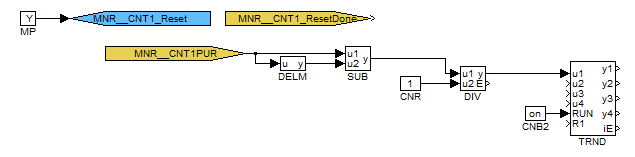
it doesn't look bad. If you only want to monitor revolutions per minute, you can set a delay of 60 in the DELM block and delete the DIV and MUL blocks. I prepared a DIV block just for case you want a value in seconds.Counter reset is only for timely reset so that the value does not overflow. But the counters are 16-bit. So the value doesn't overflow for a while.
Cheers,
Jan -
RE: Fan Speed Control with Counterposted in Monarco HAT
@mikeyh Hi Mike,
I don't know if this is the right way to measure speed. I'd rather say it's probably the only way to measure speed with just the Monarco HAT. You can use math blocks to calculate the number of ticks in a certain time (see image bellow). In the DELM block I set a delay of 1s and in the CNR block there is also a value of 1. So I get the number of ticks per second on the DIV output. Of course, you can choose another time period.Alternatively, you can use the DIF_ block directly (see doc here).
If you only need this information for observing, it will be ok. If you would like to control the rotation speed accordingly, you will need to filter the values and it will probably be a lot of work.
Cheers,
Jan -
RE: Fan Speed Control with Counterposted in Monarco HAT
@mikeyh
According to this article, anything between 3.5 and 30V should be taken as logic 1. So it should be possible to use 5 and 24 V directly from the Monarco HAT for testing.Increasing the number also happened to me during testing. I think it might have something to do with the pull up resistor, but I'd better ask an electrical expert tomorrow and let you know.
Cheers,
Jan -
RE: Fan Speed Control with Counterposted in Monarco HAT
@mikeyh
Hi Mike,
have you tried if the Monarco counter works if you connect some voltage directly to DIN1? What is the voltage at the tachometer output?
Cheers,
Jan -
RE: Power Over Ethernetposted in Monarco HAT
Hi Mike,
sorry for the late reply. To be honest, I haven't tried Monarco HAT with PoE HAT. However, by specification, HAT devices are not generally stackable. Monarco HAT should be powered by 10-30 VDC. PoE HAT supplies only 5 VDC. So I don't think it will work.
Cheers,
Jan -
RE: Licensingposted in General
@mikeyh
Hi Mike,
at the moment, it is really not possible to reactivate a license from a 32-bit OS to a 64-bit one. We are currently preparing this option and it should be available in the near future. I sent you an email with some additional information.
Cheers Jan -
RE: REXduino - Communication failure between Raspberry PI and Arduino_MEGAposted in General
@mtomek Hi Michal,
I think you can track the PIN number where error occurs when you configure the system log, as described in the last point of the Troubleshooting section described here: https://github.com/jaroslavs/REXduino/blob/master/REXduino_User_Guide.pdf.Cheers,
Jan -
RE: IEC 61850 Protocol using Rexygenposted in General discussion
@pedrowirya
Hi Pedro, as far as I know, IEC 61850 in Rexygen is not supported in any way. If there is some Python library, it would be possible to use a Python block (documentation here: https://www.rexygen.com/doc/ENGLISH/MANUALS/BRef/PYTHON.html#x276-27500016).Cheers,
Jan