Hi, is it possible to generate hardware PWM with RPi, using GPIO12 or GPIO13? I see there are flags for these pins in 0120-00_IO_Flags example, but I want to be sure. Thanks, Stepan
S
Best posts made by stepan.ozana
-
HW PWM on RPi?posted in Communication (RS232
Latest posts made by stepan.ozana
-
RE: How to run a compiled .rex model from command line for fast repeated cost-function evaluationposted in REXYGEN Studio
@cechurat
Hi,
I apologize for the delayed response. I needed to consult this issue further before getting back to you.Afterwards, I verified the following behavior: after creating the simroot folder and enabling write access to it, running my project in Simulation mode causes crashes. The issue disappears when I set log.file.enabled=1 in rexcore.cfg.
This can be used as a temporary workaround, although it slightly slows down execution, especially when the simulation is run repeatedly many times.
If there is a better systematic solution, please let me know.
Best regards,
Stepan -
RE: How to run a compiled .rex model from command line for fast repeated cost-function evaluationposted in REXYGEN Studio
@cechurat
Yes, sure. Sorry I forgot to upload previously. -
RE: How to run a compiled .rex model from command line for fast repeated cost-function evaluationposted in REXYGEN Studio
@cechurat Hi Tomas,
Thank you for your valuable comments.
I tried running:
"c:\Program Files\REX Controls\REXYGEN 3.0.5.17331\Bin\RexCore.exe" -z exec.file=myproject_exec.rex -z simulation.enabled=1 -z simulation.tickmin=0 -z simulation.steps=20000 -z simulation.start=0
I do not think it was successful, because it did not do anything. At the very least, it was supposed to create
f.txtvia the SILO block.I believe there may be something wrong with this REXYGEN project, because whenever I try Local Simulation within REXYGEN Studio, it reports a RexCore crash; please see the screenshot in the bottom-right corner. As a consequence, the application freezes and I have to kill the RexCore process manually.
In Real Time mode, it seems to run normally: it shows trends and creates
f.txtvia the SILO block. There is also a minor issue with overtime in diagnostics, probably related to the PYTHON blocks. I am not sure whether this issue is critical enough to cause RexCore to crash in Local Simulation mode.However, I believe this is a separate issue and is not directly related to the original topic of running Local Simulation mode in general.
Below you will find the project version needed to reproduce the issue.
Best regards,
StepanProject:
FC_Compact_Rezerovar_REXYGEN_V2.zip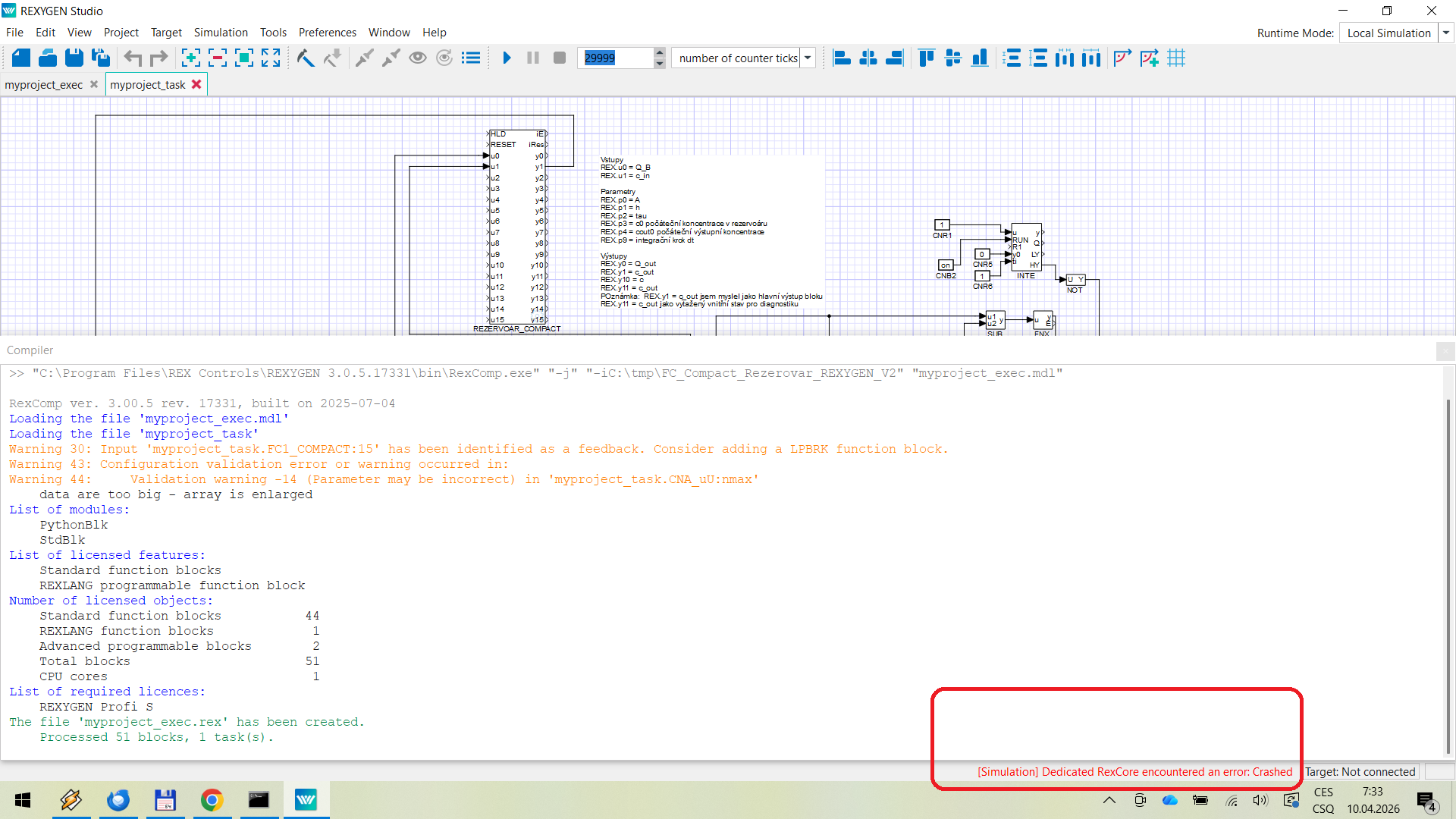
-
How to run a compiled .rex model from command line for fast repeated cost-function evaluationposted in REXYGEN Studio
Hi,
I have the following use case.My REXYGEN model contains blocks with tunable parameters. One of the model outputs represents the value of interest, for example a cost function.
I would like to run the compiled model (
*.rex) from the command line as fast as possible, ideally offline rather than in real time. For each run, I need to:- provide a specific set of parameter values,
- execute one full evaluation of the model,
- obtain the resulting value of the selected output.
More specifically, I want to call the model repeatedly from an external environment such as Python or Julia in order to tune the parameters and minimize the cost function.
Could you please advise what is the recommended workflow for this in REXYGEN?
In particular, I would like to know:
- whether this can be done with the compiled
.rexmodel directly, - how to pass parameter values from an external program,
- how to read back the value of a selected output,
- and whether Local Simulation mode is the right approach for this kind of fast offline repeated evaluation, for example with a fixed number of simulation steps or counter ticks.
Is this workflow supported, and if so, what is the simplest way to implement it?
Thanks Stepan
-
Vector demultiplexer VTOR+Python processingposted in REXYGEN Studio
Hi,
I'd like to ask why outputs of VTOR1 shows all zeros. Both Python blocks share the same python script.
It seems like the issue is connected to sources of u0,u1,u2.
Source project: ex.zip
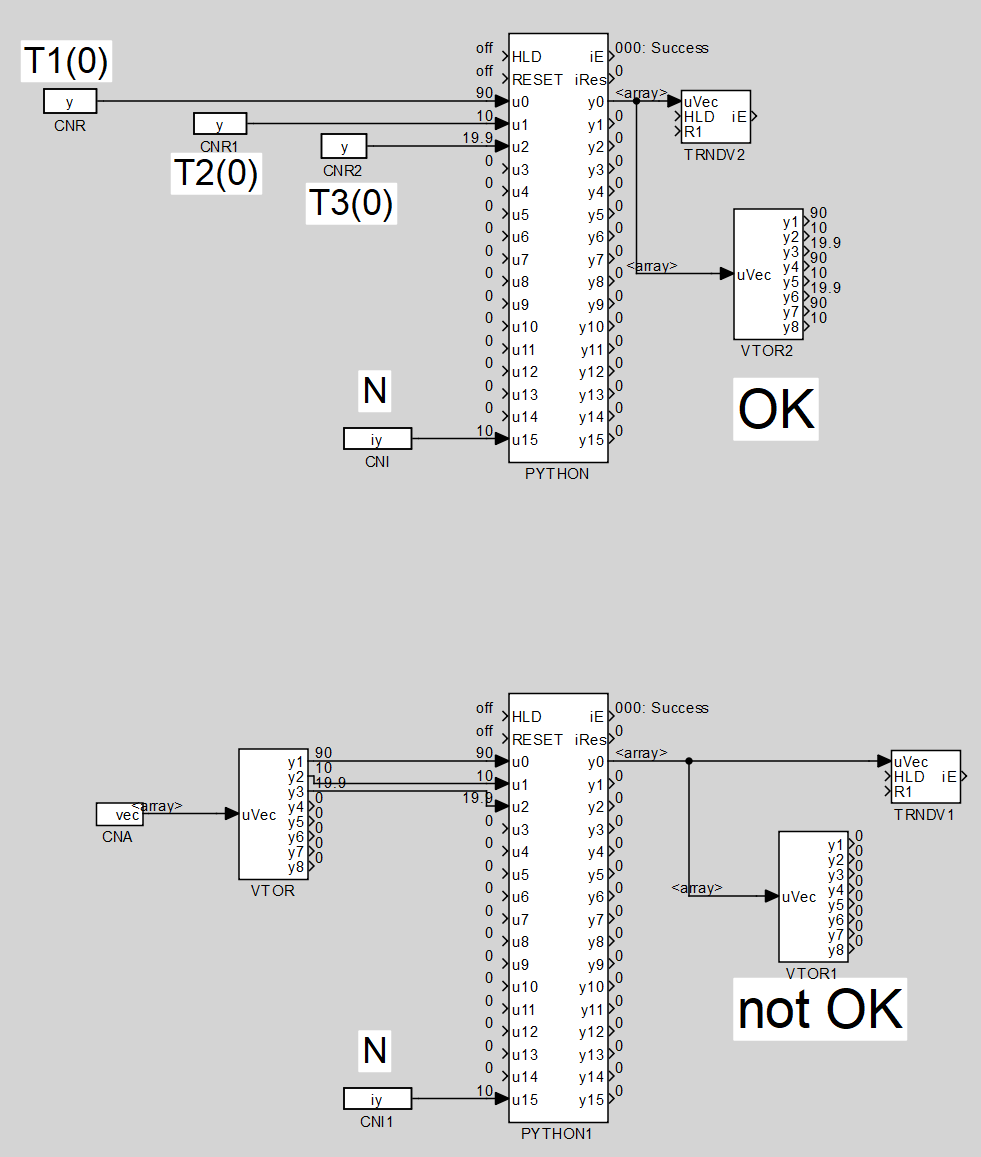
Best regards, Stepan
-
RE: Issue with the SAT blockposted in REXYGEN Studio
@Jan-Reitinger Thanks for explanation! I promise I will study the documentation in more details next time. However, still I have some remarks here.
Regarding SAT documentation:
"The maximal rate at which the active limits may vary is given by time constants tp (positive slope) and tn (negative slope)."
This statement is ambigous for me.
If we say maximal rate of the signal is affected by some parameter rate_max, then from technical point of view, higher
rate_max means higher allowable rate (1st derivative), thus indicating being close to immediate changes of the signal.
So if rate_max reaches infinity, immediate changes are allowed.Then we should say the maximal rate at which the active limits may vary is given by INVERSE OF time constants tp,
and rate_max = 1/tp, meaning that the meaning of logic in choice of parameters tp and tn is actually inverse.This is actually declared in the documentation of RLIM block as the steepest rise per second, and should be also repeated for for documentation of SAT to keep documentation consistent.
I tried series connection of CNR and RLIM, and changing CNR on the fly. If tp=0.1, then maximal slope is 10, and the new value of CNR is
reached in 0.1s, following linear ramp signal. This is OK, and similar functionality works for SAT block.Also, reading "time constants tp and tn" may indicate presence of some dynamics like first-order system 1/(tp*s+1) or 1/(tn*s+1), because this technical term is ususally used
when talking about dynamic systems. It would be much better to simply use "parameters tp and tn" instead to make things clear. -
RE: Remote parameter settingposted in REXYGEN Studio
@Jan-Reitinger I am thankful that you made this clear !
-
RE: Issue with the SAT blockposted in REXYGEN Studio
Thanks. I tried both 3.00.2 rev. 16743 and 3.04 17159. Check out the video recording:
https://drive.google.com/file/d/1-A4vBMiOb91N9w5tX6H8bUDGmSjGPXCG/view?usp=sharing
-
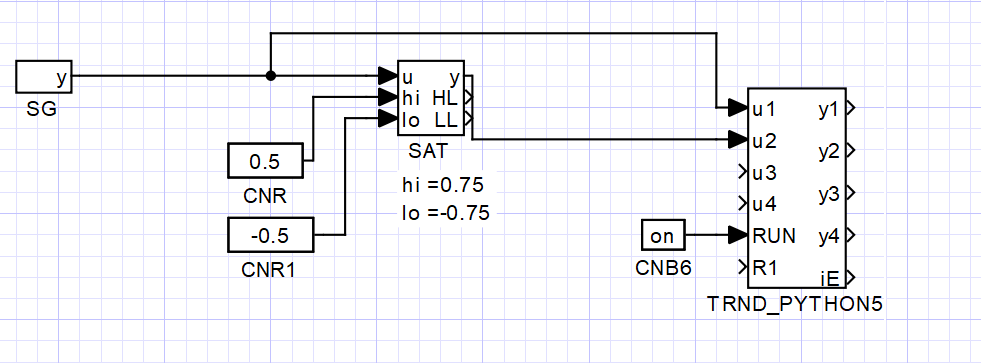
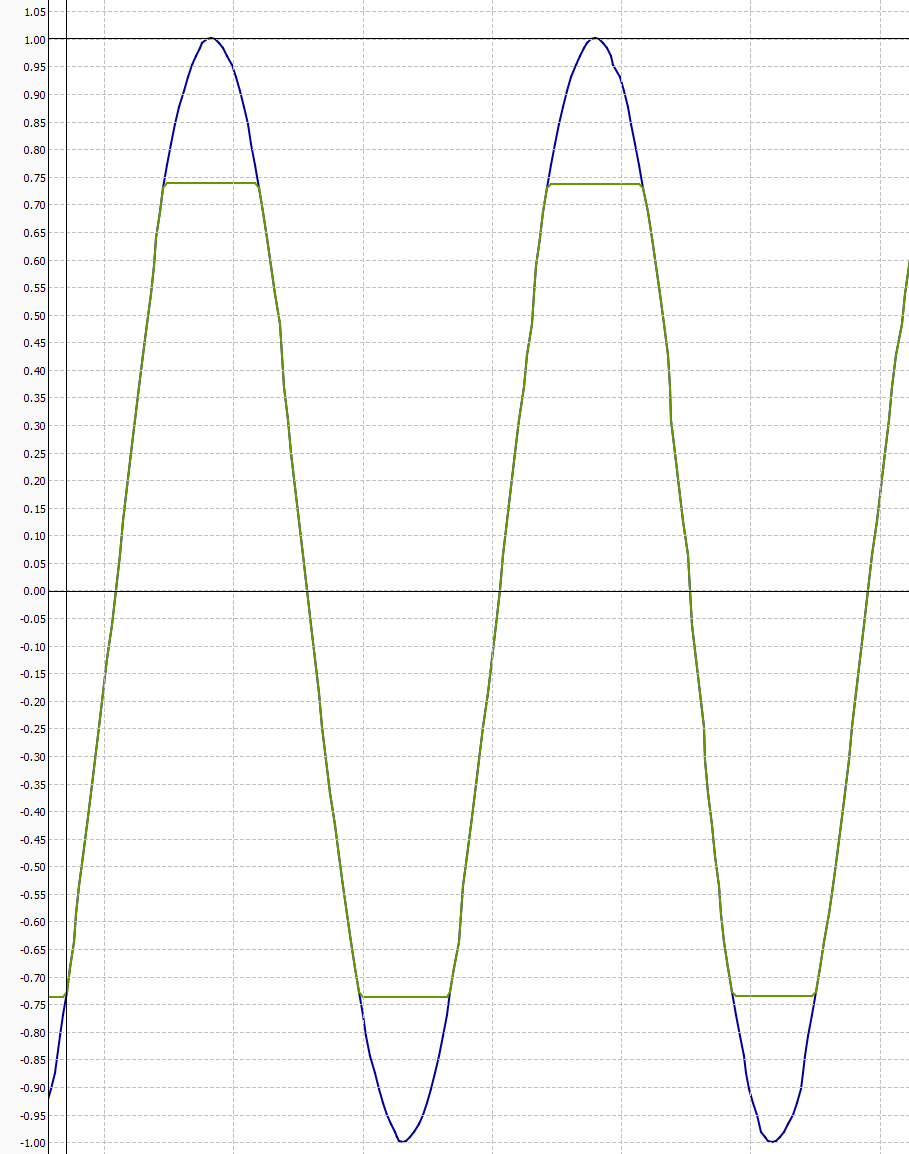
Issue with the SAT blockposted in REXYGEN Studio
Hi,
I am facing some troubles with the SAT block.
It should respect either variable limits or fixed limits, based on HLD signal.
However, in my project, only inner fixed limits (+0.75 , -0.75) are considered no matter if HLD is on or off.
-
Remote parameter settingposted in REXYGEN Studio
Hello,
I am encountering issues with remote parameter setting. My initial goal was to assign a specific filename to the CNA block so that I could specify the data file before running my project. After several unsuccessful attempts, I investigated further and discovered additional issues.
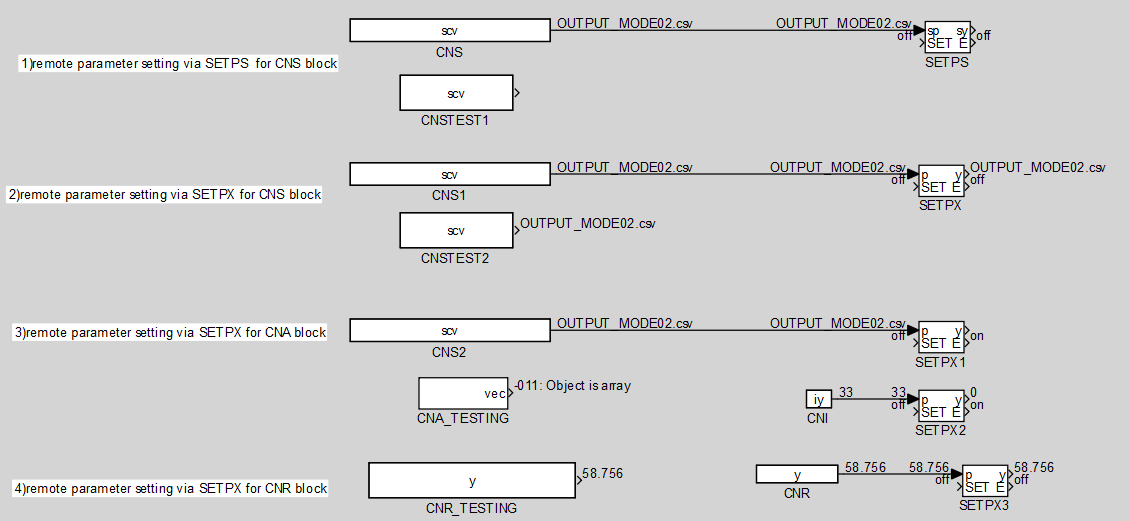
Below is a summary of the four experiments I conducted:
- Remote Parameter Setting via SETPS for the CNS Block
I attempted to change the scv parameter of the testing CNS block using the SETPS command.
The parameter did not update as expected; it remained unchanged.
- Remote Parameter Setting via SETPX for the CNS Block
Repeating the same experiment, this time I used the SETPX command to change the scv parameter.
This approach worked correctly—the scv parameter was successfully updated.
Since both experiments target the same parameter in the same block, SETPS and SETPX should ideally produce equivalent results.
- Remote Parameter Setting via SETPX for the CNA Block
I attempted to set a specific filename for the CNA block to allow pre-specification of the data file.
First, I tried to change the filename parameter, but this was unsuccessful.
I also tried updating the nmax parameter, but that too did not work.
- Remote Parameter Setting via SETPX for the CNR Block
As a control test, I changed the ycn parameter of the testing CNR block using SETPX.
This operation executed without any issues.
The REXYGEN project is attached for further review.