Hi,
the registration is temporarily disabled due to massive amount of Internet crawlers and spambots. A workaround is being prepared as I write this.
What lab is your favourite?
Best regards,
Jaroslav
Hi,
the registration is temporarily disabled due to massive amount of Internet crawlers and spambots. A workaround is being prepared as I write this.
What lab is your favourite?
Best regards,
Jaroslav
Hello Ivan,
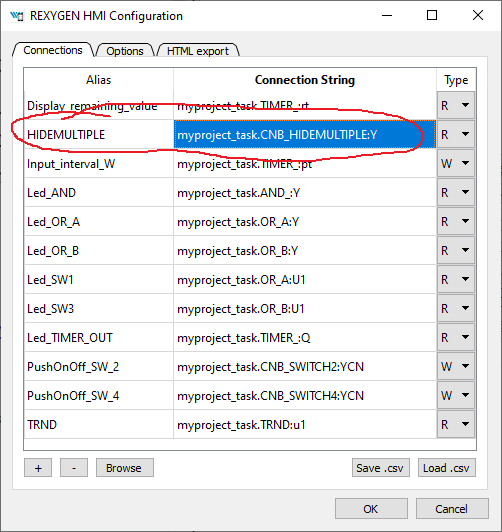
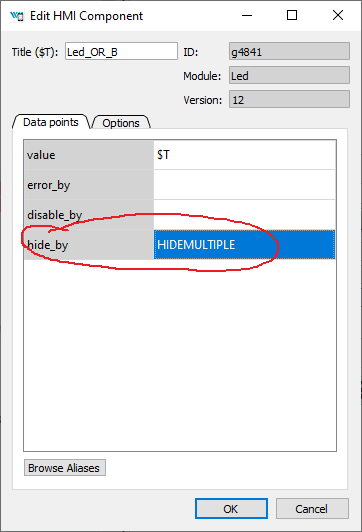
do I understand it correctly that you are trying to hide multiple elements in HMI using a single variable in your algorithm?
Why not just define a single alias and use it as the hide_by Data point in all the elements which you intend to hide?
Or am I missing something?
Jaroslav
Hi @defcon-klaxon
this is just to let you know that you can access the labs of PID Control Laboratory again.
Kind regards,
Jaroslav
Just for the reference, the example project with custom .js file can be found here: https://forum.rexygen.com/topic/93/responsive-design/4
Jaroslav
Hello Michal,
the error codes are listed in the REXduino_slave.ino file. The codes you provided mean some problem with pin number. However, you are using an outdated version of REXduino so no guarantee...
Therefore, as the first step, I recommend upgrading to the newest REXduino. I have just pushed a hotfix for the naming conflict to REXduino GitHub so you should be able to use it with any version of REXYGEN.
Please try compiling and running the included example 51. Make sure to upgrade your Arduino as well.
Let me know if it helped.
Best regards
Jaroslav
@enovikoff said in Measuring water flow with UniPi:
after searching fruitlessly for a Pi HAT that included a counter
What about the Monarco HAT? It has 2 high-speed counters onboard...

Jaroslav
@enovikoff Thank you, I'll see what can be done in this direction.
Jaroslav
Hello,
thanks for sharing your experience and findings. There's nothing to add, only that from the nearest release the REXYGEN compiler will issue a warning when two drivers use the same configuration .rio file.
Jaroslav
Hello,
thanks for another contribution!
Why not use the MP block for starting the calibration procedure?
Minor note: We always recommend keeping the block name for clarity and "readability" of the algorithm. I'd go for "REXLANG_MHZ16" in this case.
Thanks again,
Jaroslav
Hello,
I do not have any better advice than to add this line to your code, which will make the compiler believe that the variable dateInterval is used.
dateInterval = dateInterval;
Can you share or send your code leading to such a false warning? Thank you.
Jaroslav
Awesome, thanks!
Do you think e.g. a GitHub repo for contributed content would be beneficial? Let me know your thoughts on this.
Jaroslav
Hi Eric,
thank you for sharing your work!
Jaroslav
Hi,
how about running Python code alongside REXYGEN and pushing the data to running task(s) via REST API of REXYGEN? This is shown in example project 0302-03 which is included in REXYGEN Studio.
Both RS-232 and CAN bus are also an option, but in that case you'll only get raw data and you'll have to parse it yourself to get useful information.
Hope this helps, let me know.
Jaroslav
@RexPeter said in Automatic keeping track of project revision:
Software is in my point of view never "finished"
Tell us about it ")
Your recommendation regarding revision identifier is in our pipeline. Since Monday already. Thanks!
Jaroslav