Hi All,
How come the time in the system log is different to what the system actually is?
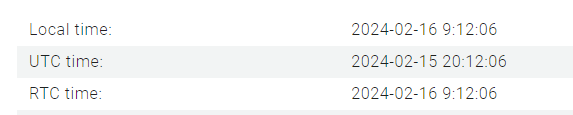
The local and RTC are correct, but the time in the system log in Studio is 13 hours ahead.
Cheers,
Mike
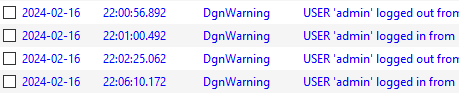
Hi All,
How come the time in the system log is different to what the system actually is?
The local and RTC are correct, but the time in the system log in Studio is 13 hours ahead.
Cheers,
Mike
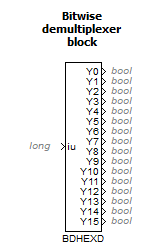
sorry, I've just worked it out using the Bitwise demultiplexer
Hi All,
I'm reading some registers on a device and passing them to other parts within the REX program.
My question is why am I dropping the decimal point? on the left you can see the true values and on the right you can see the value has now dropped a decimal. What would cause this?

Cheers,
Mike
@Jan-Reitinger Hi Jan,
Thanks for clearign that up.
I'm not sure what happened with the slave device, it hasn't been changed at all, a mystery! If I find the issue I'll le you know.
Cheers,
Mike
@cechurat Hi Tomas,
I'd like to be able to store and use this data so I can run a refrigeration model in REX. Once I've got a handle on it I'll share the model here for those that are interested.
Cheers
Mike
Hi All,
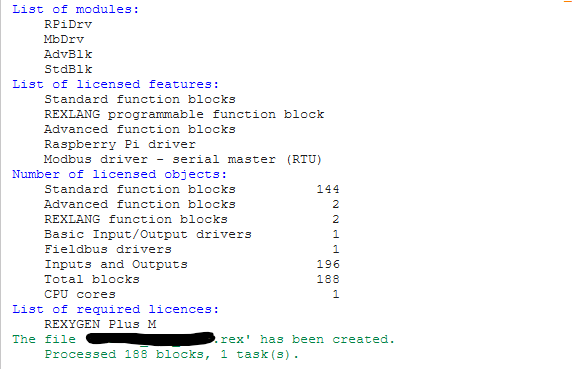
Any reason I have suddenly started to get this error


I have all the licenses required, this monarco has been running fine and today suddenly it's not once a new version of the algorithum was uploaded. These are the licenses on the monarco.

this is the complirer log
Any ideas?
Cheers,
Mike
Hi All,
What's the best way to start/create a PH diagram in REXYGEN?
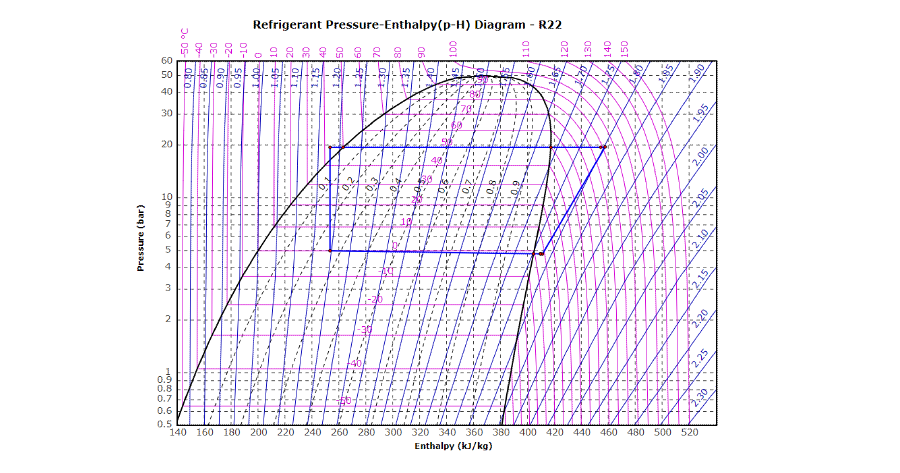
I'm going to try and create a working model for HIL testing
Cheers,
Mike
@cechurat Hi Tomas,
Thank you, that lead me down the right path to fix it.
New error! What does this mean?

Cheers,
Mike
I'm sure how or if it's related but this seemed to go away after I removed the HMI block from the exec.
Cheers,
Mike
Hi All,
Is this something to be worried about? I'm not sure what it means.

Cheers,
Mike
